The year 2020 has come and with it the next Mars launch window. As such, several national space agencies have missions to Mars planned during the minimum-energy launch window, which runs from July to September this year. This window occurs once every 26 months. What is each mission about and what do they hope to accomplish?
NASA: Mars 2020

NASA has accomplished more than any other organization in on-planet and orbital Mars research since the 1960’s. They will attempt to continue that legacy with the launch of Mars 2020 this year.
Mars 2020 was first announced in 2012, and is planned to launch on July 17, 2020. It is a currently unnamed rover that is based on the highly successful design of the Curiosity rover. It will also contain a highly anticipated helicopter drone, Mars Helicopter Scout. The mission is anticipated to touch down in the Jezero Crater on February 18, 2021. The landing site was selected because it was once a 250 m deep lake with a river delta flowing into it, which leads to a high probability of finding evidence of past life, if there ever was any.
The rover is designed primarily to gather data on astrobiology, if present. The mission will collect soil and rock samples and cache them for a potential Mars sample return mission in the future. It’s secondary goals are to continue testing technologies needed for human exploration, characterize Martian weather and dust, and for the first time place a working microphone on Mars (two previous missions had microphones, Mars Polar Lander crashed and Phoenix had a landing camera microphone which was never used).
Instruments on board this rover will be:
- Planetary Instrument for X-Ray Lithochemistry (PIXL), an X-ray fluorescence spectrometer to determine the fine scale elemental composition of Martian surface materials.
- Radar Imager for Mars’ subsurface experiment (RIMFAX), a ground-penetrating radar to image different ground densities, structural layers, buried rocks, meteorites, and detect underground water ice and salty brine at 10 m (33 ft) depth.
- Mars Environmental Dynamics Analyzer (MEDA), a set of sensors that measure temperature, wind speed and direction, pressure, relative humidity, radiation, and dust particle size and shape.
- Mars Oxygen ISRU Experiment (MOXIE), an exploration technology investigation that will produce a small amount of oxygen from Martian atmospheric carbon dioxide. This technology could be scaled up in the future for human life support or to make the rocket fuel for return missions.
- SuperCam, an instrument suite that can provide imaging, chemical composition analysis and mineralogy in rocks and regolith from a distance. It is an upgraded version of the ChemCam on the Curiosity rover but with two lasers and four spectrometers that will allow it to remotely identify biosignatures and assess the past habitability.
- Mastcam-Z, a stereoscopic imaging system with the ability to zoom.
- Scanning Habitable Environments with Raman and Luminescence for Organics and Chemicals (SHERLOC), an ultraviolet Raman spectrometer that uses fine-scale imaging and an ultraviolet (UV) laser to determine fine-scale mineralogy and detect organic compounds.
- Mars Helicopter Scout (MHS) is a planned solar powered helicopter drone with a mass of 1.8 kg (4.0 lb) that will be tested for flight stability, and for its potential to scout the best driving route for the rover. Other than cameras, it carries no scientific instruments. Its job is merely to demonstrate the practicality of flight on Mars. The small helicopter is expected to fly up to five times during its 30-day testing, and will fly no more than 3 minutes per day. It is a technology demonstrator that will form the foundation on which more capable helicopters can be developed for aerial exploration of Mars and other planetary targets with an atmosphere.
- Two microphones will be used during the landing event, while driving, and when collecting samples.

By looking at the above instrumentation, we can see the biggest goal of looking for signs of past life. PIXL, SuperCam and SHERLOC are each included with this in mind. RIMFAX and MEDA are both for characterizing the Martian environment.
MOXIE is an interesting and highly desirable in-situ resource utilization technique originally envisioned by Dr. Robert Zubrin. This instrument uses an electrified nonporous disc sandwiched between two porous membrane to free the oxygen atom from CO2, which makes up the vast majority of the Martian atmosphere. By using this technique, NASA hopes to be able to produce large enough amounts of oxygen in the future for use as breathing gas or as fuel oxidizer.
MHS is a new addition to a Mars mission. By testing the ability of a helicopter-style craft to fly through the thin Martian atmosphere, NASA can glean some extremely valuable data about how astronauts might move about Mars and other planetary environments in the solar system. MHS is not designed with any particular experiment in mind except for the vehicle itself. It will be used to fly ahead of the lander and give a better understanding of the path ahead, which can be used to fine tune the path of travel.

Kazachok and Rosalind Franklin
The ESA and Roscosmos have designed a joint mission that is designated as an exobiology mission to Mars. This mission actually began in 2016 with the launch of the Trace Gas Orbiter (TGO) satellite and the Schiaparelli lander. Though Schiaparelli crash landed on the surface, TGO continues to orbit and will be used as the data relay satellite for the 2020 missions.
The plan calls for a launch on July 25, 2020 aboard a Russian Proton-M rocket. The Kazachok (“little Cossack”) lander, built by Roscosmos will descend in March 2021, landing at Oxia Planum, near the Martian equator. The lander will then release the Rosalind Franklin rover and begin a one-year study of the landing site.
Kazachok has several instruments, designed by Russia and ESA countries:
- The Lander Radioscience experiment (LaRa) will study the internal structure of Mars, will help to understand the sublimation/condensation cycle of atmospheric CO2, and will make precise measurements of the rotation and orientation of the planet by monitoring two-way Doppler frequency shifts between the lander and Earth. It will also detect variations in angular momentum due to the redistribution of masses, such as the migration of ice from the polar caps to the atmosphere. Developed by Belgium.
- The Habitability, Brine, Irradiation and Temperature (HABIT) package will investigate the amount of water vapour in the atmosphere, daily and seasonal variations in ground and air temperatures, and the UV radiation environment. Developed by Sweden.
- Meteorological package (METEO-M). Developed by Russia. The instrument will incorporate the following sensor packages:
- Pressure and humidity sensors (METEO-P, METEO-H). Developed by Finland. The instrument has extensive heritage from those in the Curiosity rover, Schiaparelli lander and Phoenix lander.
- Radiation and dust sensors (RDM). Developed by Spain.
- Anisotropic magneto-resistance (AMR) sensor to measure magnetic fields. Developed by Spain.
- A magnetometer named MAIGRET, developed by Russia. The instrument will incorporate the Wave Analyser Module (WAM), developed by the Czech Republic.
- A set of cameras to characterise the landing site environment (TSPP). Developed by Russia.
- Instrument interface and memory unit (BIP). Developed by Russia.
- An IR Fourier spectrometer to study the atmosphere (FAST). Developed by Russia.
- Active Detection of Radiation of Nuclei-ExoMars (ADRON-EM). Developed by Russia.
- Multi-channel Diode-Laser Spectrometer for atmospheric investigations (M-DLS). Developed by Russia.
- Radio thermometer for soil temperatures (PAT-M). Developed by Russia.
- Dust particle size, impact, and atmospheric charging instrument suite (Dust Suite). Developed by Russia.
- A seismometer named SEM. Developed by Russia.
- Gas chromatography–mass spectrometry for atmospheric analysis (MGAK). Developed by Russia.
Rosalind Franklin is a rover built by several ESA countries, most notably in Britain by AirBus, a French company. The wheels and suspension system were designed and built in Canada, an ESA “non-full member” partner. The rover is designed to travel 70 meters per sol (Martian day). Over its operational lifetime of 7 months, the rover is expected to travel 4 km. Due to control constraints, the rover will autonomously travel on the Martian surface.

Rosalind Franklin has changed in size twice, once when NASA agreed to a joint mission and again when NASA reconsidered and instead opted to pursue its own Mars 2020 mission. As such, the rover weighs approximately 300 kg and carries the Pasteur instrument suite designed for this mission:
- Panoramic Camera (PanCam) – PanCam has been designed to perform digital terrain mapping for the rover and to search for morphological signatures of past biological activity preserved on the texture of surface rocks. The PanCam Optical Bench (OB) mounted on the Rover mast includes two wide angle cameras (WACs) for multi-spectral stereoscopic panoramic imaging, and a high resolution camera (HRC) for high-resolution colour imaging. PanCam will also support the scientific measurements of other instruments by taking high-resolution images of locations that are difficult to access, such as craters or rock walls, and by supporting the selection of the best sites to carry out exobiology studies.
- Infrared Spectrometer for ExoMars (ISEM) – The ISEM optical box will be installed on the rover’s mast, below PanCam’s HRC, with an electronics box inside the Rover. It will be used to assess bulk mineralogy characterization and remote identification of water-related minerals. Working with PanCam, ISEM will contribute to the selection of suitable samples for further analysis by the other instruments.
- Water Ice Subsurface Deposits Observation on Mars (WISDOM) is a ground-penetrating radar that will explore the subsurface of Mars to identify layering and help select interesting buried formations from which to collect samples for analysis. It can transmit and receive signals using two Vivaldi-antennas mounted on the aft section of the rover, with electronics inside the Rover. Electromagnetic waves penetrating into the ground are reflected at places where there is a sudden transition in the electrical parameters of the soil. By studying these reflections it is possible to construct a stratigraphic map of the subsurface and identify underground targets down to 2 to 3 m (7 to 10 ft) in depth, comparable to the 2 m reach of the rover’s drill. These data, combined with those produced by the other survey instruments and by the analyses carried out on previously collected samples, will be used to support drilling activities.
- Adron-RM is a neutron spectrometer to search for subsurface water ice and hydrated minerals. It is housed inside the Rover and will be used in combination with the WISDOM ground-penetrating radar to study the subsurface beneath the rover and to search for optimal sites for drilling and sample collection.
- Close-Up Imager (CLUPI), mounted on the drill box, will visually study rock targets at close range (50 cm/20 in) with sub-millimetre resolution. This instrument will also investigate the fines produced during drilling operations, and image samples collected by the drill. CLUPI has variable focusing and can obtain high-resolution images at longer distances. The CLUPI imaging unit is complemented by two mirrors and a calibration target.
- Mars Multispectral Imager for Subsurface Studies (Ma_MISS) is an infrared spectrometer located inside the core drill. Ma_MISS will observe the lateral wall of the borehole created by the drill to study the subsurface stratigraphy, to understand the distribution and state of water-related minerals, and to characterise the geophysical environment. The analyses of unexposed material by Ma_MISS, together with data obtained with the spectrometers located inside the rover, will be crucial for the unambiguous interpretation of the original conditions of Martian rock formation. The composition of the regolith and crustal rocks provides important information about the geologic evolution of the near-surface crust, the evolution of the atmosphere and climate, and the existence of past life.
- MicrOmega is an infrared hyperspectral microscope housed within the Rover’s Analytical Laboratory Drawer (ALD) that can analyse the powder material derived from crushing samples collected by the core drill. Its objective is to study mineral grain assemblages in detail to try to unravel their geological origin, structure, and composition. These data will be vital for interpreting past and present geological processes and environments on Mars. Because MicrOmega is an imaging instrument, it can also be used to identify grains that are particularly interesting, and assign them as targets for Raman and MOMA-LDMS observations.
- RLS is a Raman laser spectrometer housed within the ALD that will provide geological and mineralogical context information complementary to that obtained by MicrOmega. It is a very fast and useful technique employed to identify mineral phases produced by water-related processes. It will help to identify organic compounds and search for life by identifying the mineral products and indicators of biologic activities (biosignatures).
- Mars Organic Molecule Analyzer (MOMA) is the rover’s largest instrument, housed within the ALD. It will conduct a broad-range, very-high sensitivity search for organic molecules in the collected sample. It includes two different ways for extracting organics: laser desorption and thermal volatilisation, followed by separation using four GC-MS columns. The identification of the evolved organic molecules is performed with an ion trap mass spectrometer. The Max Planck Institute for Solar System Research is leading the development. International partners include NASA. The mass spectrometer is provided from the Goddard Space Flight Center, while the GC is provided by the two French institutes LISA and LATMOS. The UV-Laser is being developed by the Laser Zentrum Hannover.
Moreover, the rover also carries a large drill which is capable of drilling over 2 meters into the Martian regolith. Unlike previous rovers, Rosalind Franklin does not carry any meteorological equipment, as the Kazachok lander will provide meteorological data for the mission.
As can be seen this mission is solely concerned with the potential for exobiology and past life on Mars. It will build upon the massive amount of data already gained in situ and will provide more information along those lines.
Hope Mars Mission

The Hope Mars Mission, also called the Emirates Mars Mission, is a mission developed by the United Arab Emirates for 2020. It is a Mars orbiter and will be launched in July 2020. This mission is specifically designed to study the Martian climate and the changes that have been observed thus far. It is hoped that it will work toward providing an answer as to why Mars off-gasses oxygen and hydrogen into space and the reasons behind drastic changes to the Martian climate.
Hope, or Al-Amal, will carry three instruments into Martian orbit:
- Emirates eXploration Imager (EXI) is a multi-band camera capable of taking high resolution images with a spatial resolution of better than 8 km. It uses a selector wheel mechanism consisting of 6 discrete bandpass filters to sample the optical spectral region: 3 UV bands and 3 visible (RGB) bands. EXI measures properties of water, ice, dust, aerosols and abundance of ozone in Mars’ atmosphere. The instrument is being developed at the Laboratory for Atmospheric and Space Physics (LASP) at the University of Colorado, in collaboration with the Mohammed Bin Rashid Space Centre (MBRSC) at Dubai, UAE.
- Emirates Mars Ultraviolet Spectrometer (EMUS) is a far-ultraviolet imaging spectrograph that measures emissions in the spectral range 100–170 nm to measure global characteristics and variability of the thermosphere, and hydrogen and oxygen coronae. Design and development is led by the Laboratory for Atmospheric and Space Physics at the University of Colorado Boulder.
- Emirates Mars Infrared Spectrometer (EMIRS) is an interferometric thermal infrared spectrometer developed by the Arizona State University (ASU) and the Mohammed Bin Rashid Space Centre (MBRSC). It examines temperature profiles, ice, water vapour and dust in the atmosphere. EMIRS will provide a view of the lower and middle atmosphere. Development is led by the Arizona State University with support from MBRSC.
The mission will be launched from Japan on a Mitsubishi Heavy Industries H-IIA launcher.
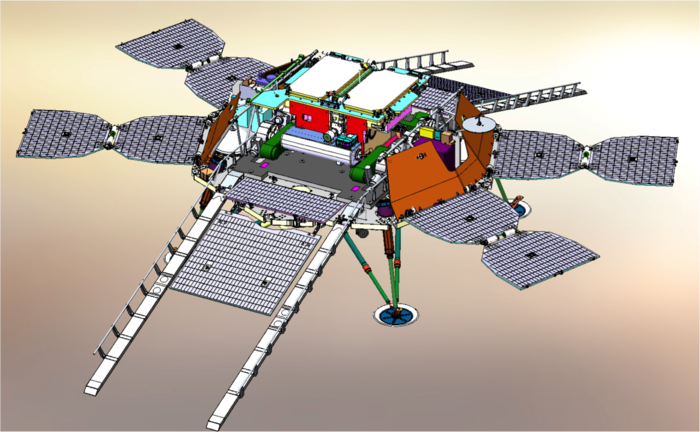
Mars Global Remote Sensing Orbiter and Small Rover
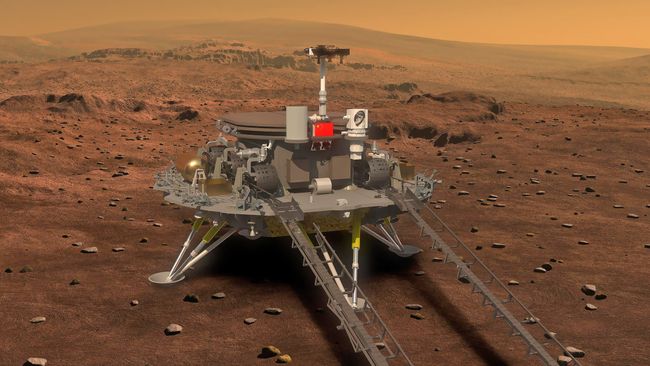
The Mars Global Remote Sensing Orbiter and Small Rover is a planned mission by China for the 2020 launch window. This mission is designed to characterize the Martian topography, atmosphere, and search for past and current life. It is also a demonstrator mission for a future Mars sample return mission planned for the 2030s. As the title suggests, it is comprised of both and orbiter and a lander.
The orbiter carries these instruments:
- Medium Resolution Camera (MRC) with a resolution of 100 m from a 400 km orbit
- High Resolution Camera (HRC) with a resolution of 2 m from a 400 km orbit
- Mars Magnetometer (MM)
- Mars Mineral Spectrometer (MMS), to determine elementary composition
- Orbiter Subsurface Radar (OSR)
- Mars Ion and Neutral Particle Analyzer (MINPA)
The rover will carry:
- Ground-Penetrating Radar (GPR), to image about 100 m (330 ft) below the Martian surface
- Mars Surface Magnetic Field Detector (MSMFD)
- Mars Meteorological Measurement Instrument (MMMI)
- Mars Surface Compound Detector (MSCD)
- Multi-Spectrum Camera (MSC)
- Navigation and Topography Camera (NTC)
Off to Mars We Go!
As can be seen above, 2020 will see the launch of a plethora of Mars missions, with new countries entering the arena for the first time. UAE has previously only been strategically involved with spaceflight. The Hope probe will be their first foray into interplanetary space. China previously launched a small piggy-back lander with the Russian Phobos-Grunt mission, but that mission failed just days after liftoff.
As NASA and the US look at potential humans-to-Mars missions for the 2030 timeframe, expect the focus on Mars to become more defined over the rest of the 2020s launch windows. India has already funded and is developing a follow-up to their successful Mars Orbiter Mission-2, also called Mangalyaan-2 (“Mars Traveler 2” in Sanskrit) which will be launched during the 2024 window.
However, as a word of caution, space travel is difficult. Travelling to Mars has proven to be even more so than geocentric missions around the Earth. Of a total of 55 missions specifically to Mars, including observational fly-bys, only 25 have been successful. If this math holds true, expect at least two failures of the four Mars missions this year. This is not to be a naysayer, but to be realistic about the statistics of Mars missions. Here’s hoping all four missions are successful and provide solid data to their respective countries.
